PAT_A1018
PAT甲级1018.
目录
A1018
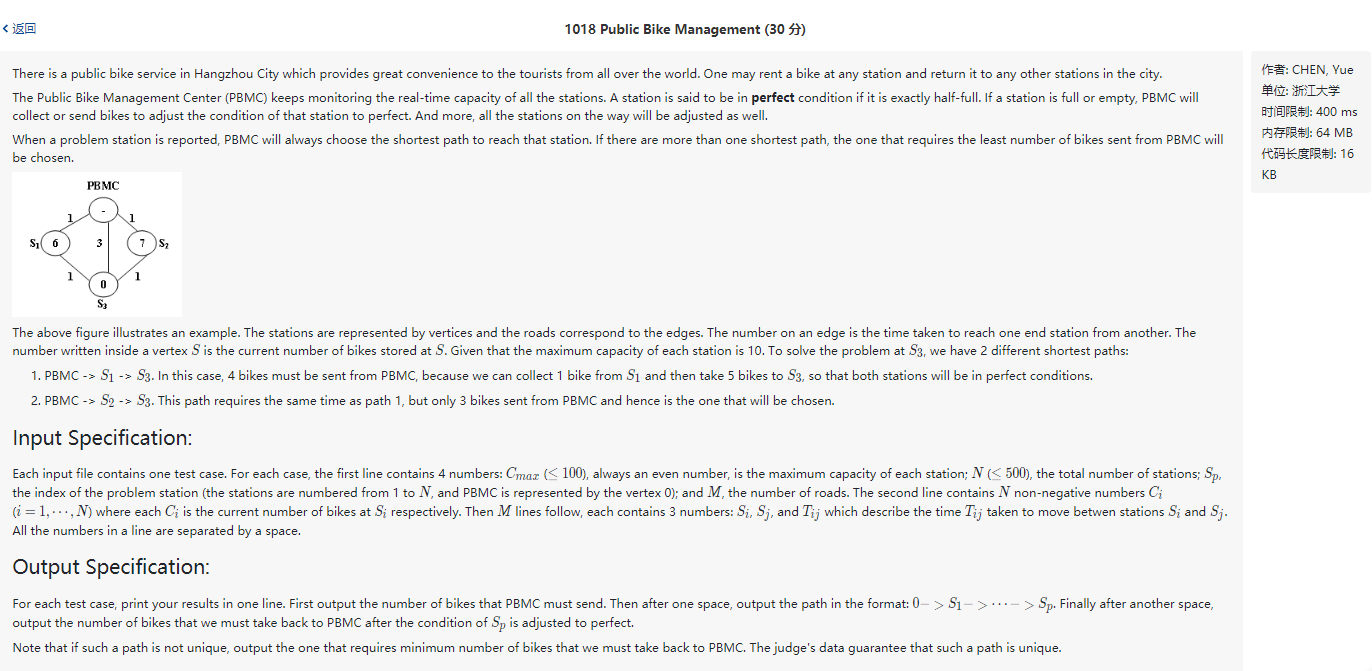
题目
样例
输入:
10 3 3 5
6 7 0
0 1 1
0 2 1
0 3 3
1 3 1
2 3 1
输出:
3 0->2->3 0
思路和坑点
Dijkstra+DFS计算出最短路径,然后根据要求进行优化.
最短路径的算法可以使用模板,根据另外的尺度进行优化比较复杂。但是实际比较好处理,对于获得的一条临时最短路径,做以下分析。假设从管理站0出发的时候不带自行车,也就是携带量bring=0,然后每次经过一个站,如果需要补充就减去,如果需要回收就做加上,那么整个路径上bring最小的时候的绝对值便是需要的自行车数量,如果都是回收的,最后bring依然是0,也就是不用带自行车。最后考虑待带回的自行车,遍历路径的时候计算路径上的总共自行车cnt,最后带上出发时候的自行车就是总共最后剩余的。根据这两个优化尺度获得最终的结果。
AC代码
#include<bits/stdc++.h>
using namespace std;
#define MAXN 505
#define INF 0x3fffffff
int G[MAXN][MAXN]; //图
bool vis[MAXN]={false}; //遍历标记
int dis[MAXN]; //距离数组
int c,n,sp,m;
int biken[MAXN]={INF}; //每个站点的自行车数量,0号站记为无穷大,其实用不到,但是为了避免误用,这样初始化易于发现错误
vector<int> path,temppath; //路径数组和前驱数组
vector<int> pre[MAXN];
int op1=INF,op2=INF; //第二和第三尺度优化
void D(){ //dijkstra算法模板
fill(dis,dis+MAXN,INF);
dis[0]=0;
for(int i=0;i<n+1;i++){
int u=-1,MIN=INF;
for(int j=0;j<n+1;j++){
if(vis[j]==false&&dis[j]<MIN){
u=j;
MIN=dis[j];
}
}
if(u==-1) return;
vis[u]=true;
for(int v=0;v<=n+1;v++){
if(vis[v]==false&&G[u][v]!=INF){
if(dis[u]+G[u][v]<dis[v]){
dis[v]=dis[u]+G[u][v];
pre[v].clear();
pre[v].push_back(u);
}
else if(dis[u]+G[u][v]==dis[v])
pre[v].push_back(u);
}
}
}
}
void dfs(int u){ //对获得的每一条路径进行dfs方式遍历
if(u==0){ //得到一条路径时进行优化 (dfs边界)
int bring=0,cnt=0; //临时的优化变量
for(int i=temppath.size()-1;i>=0;i--){
cnt+=biken[temppath[i]]-c/2;
bring=min(bring,cnt);
}
bring=bring>=0?0:-bring; //计算需要带的自行车
cnt+=bring; //需要带回的自行车
if(bring<op1){ //如果更优,则保存更优结果
path=temppath;
op1=bring; op2=cnt;
}
else if(bring==op1&&cnt<op2){
path=temppath;
op2=cnt;
}
return;
}
temppath.push_back(u); //dfs模板
for(int i=0;i<pre[u].size();i++){
dfs(pre[u][i]);
}
temppath.pop_back();
}
int main(void){
#ifdef ONLINE_JUDGE
#else
freopen("1.txt","r",stdin);
#endif
fill(G[0],G[0]+MAXN*MAXN,INF);
scanf("%d%d%d%d",&c,&n,&sp,&m);
for(int i=1;i<=n;i++){
scanf("%d",&biken[i]);
}
for(int i=0;i<m;i++){
int a,b,c;
scanf("%d%d%d",&a,&b,&c);
G[a][b]=G[b][a]=c;
}
D();
dfs(sp);
printf("%d 0",op1); //输出最终结果
for(int i=path.size()-1;i>=0;i--){
printf("->%d",path[i]);
}
printf(" %d",op2);
return 0;
}